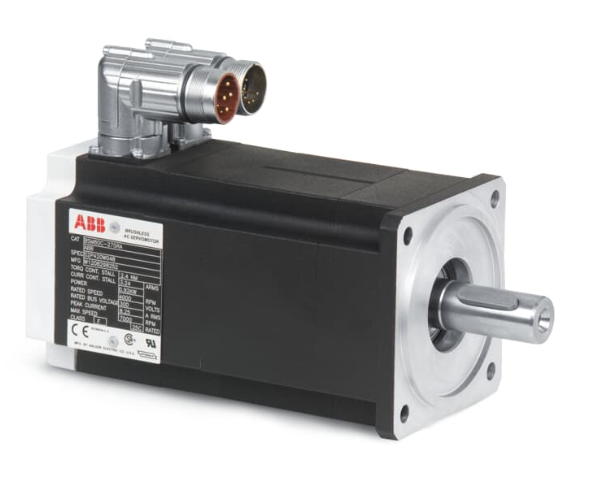
BSM90C-375UAX ABB机器人电机
目前主要是机器人末端需要安装一个活动吸盘,可以根据需求,让这个吸盘左右移动,注意这个是双吸盘结构,电机需要带动一个吸盘,从而达到实时调整两个吸盘间距的目的。
1.codesys软件:原有的控制基础都是在这上面做的2状态机:工业控制中都是通过这个去控制,也非常好用;
3.matlab状态机: matlab里面的这个状态机工具非常好用,可以仿真复杂的状态之间的跳转,辅助开发复杂的工程逻辑,之前一直想用起来,这次会加上去,正好用这个实际的工程案例测试一下怎么用的问题,后续再遇到类似的场景就可以先仿真逻辑,不用边写边改。
entry 动作一以关键字entry或 en开始一个新行,后跟冒号,再后面是用一行或多行表示的一个或多个动作语句。要在同一行上分隔多个动作,请使用逗号或分号。
您可以在状态名称所在的同一行上开始entry 动作。在这种情况下,要以正斜杠()(而不是entry 关键字)开始entry 动作。
exit动作一以关键字exit或ex开始一个新行,后跟冒号,再后面是用一行或多行表示的一个或多个动作语句。要在同一行上分隔多个动作,请使用逗号或分号。
during动作一以关键字during或du开始一个新行,后跟冒号,再后面是用一行或多行表示的一个或多个动作语句。要在同一行上分隔多个动作,请使用逗号或分号。
bind 动作一以关键字 bind 开始一个新行,后跟冒号,再后面是用一行或多行表示的一个或多个数据或事件。要在同一行上分隔多个动作,请使用逗号或分号。
on动作一以关键字on开头,后跟空格和事件或消息的名称,后跟冒号,然后是用一行或多行表示的一个或多个动作语句,例如
on ev1: exit0;
要在同一行上分隔多个动作,请使用逗号或分号。如果您需要用不同事件触发不同动作,请在状态标签中输入多个on代码块。一个代码块指定一个特定事件或消息的动作,例如:
on ev1: action10; on ev2: action20;
您为状态输入的动作的执行仅取决于其动作类型,而不取决于您在标签中输入动作的顺序。如果没有为语句显式指定一种动作类型,则 Stateflow图会将该语句视为一个entry动作。

雄霸销售工业自动化零件,包括新产品和停产产品,以及购买此类特色产品通过独立渠道进行。雄霸不是授权经销商,本网站上特色产品的经销商或代表。
所有产品名称/产品图片,本网站上使用的商标、品牌和徽标是其各自所有者的财产。
带有这些名称、图像、商标、品牌和徽标的产品描述、描述或销售仅用于识别目的,并不意味着与任何权利持有人有任何从属关系或授权。
全国服务热线
18030183032
邮 箱:3248602330@qq.com
地 址:厦门市思明区吕岭路1733号创想中心2009-2010单元

Copyright © 2022-2024 厦门雄霸电子商务有限公司 版权所有 备案号:闽ICP备14012685号-38
18030183032